Problem Statement
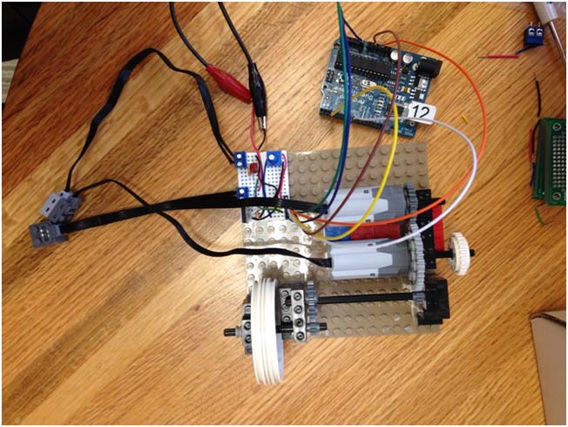
- Given a Lego DC motor set up.
-
Connected to a circuitry allowing to manually adjust the desired
rpm and a way to sense the current rpm using an arduino board.
-
Make the actual motor rpm = desired rpm with a robust control.
Outline
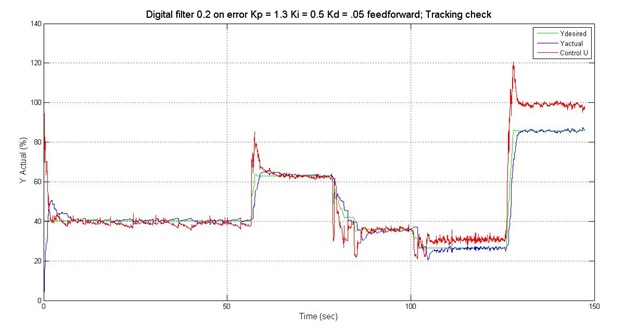
- Do a simple PID with digital filtering
- Build a PID control with low pass filter in Laplace space
- Convert to discrete z space
- Test for robustness and tracking
Approach 1
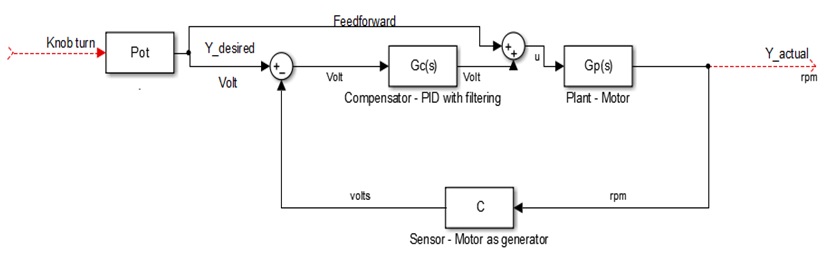
PID with digital filter with Feedforward
Used an usual implementation of PID
Smoothed the error with digital filter
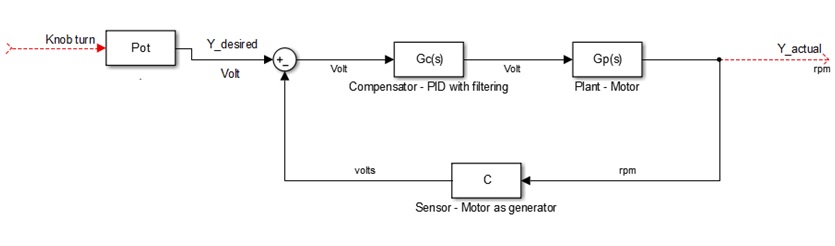
Approach 2
- PID with low pass filter using difference equation
- Equation in continuous Laplace s space
- Convert to discrete space