Computer Vision Projects Posted on January, 20th, 2014
This was an introductory course to computer vision and computational photography. In this course, we explored four topics: 1) image features, 2) image morphing, 3) shape matching, and 4) image search. All the programming was done in Matlab.
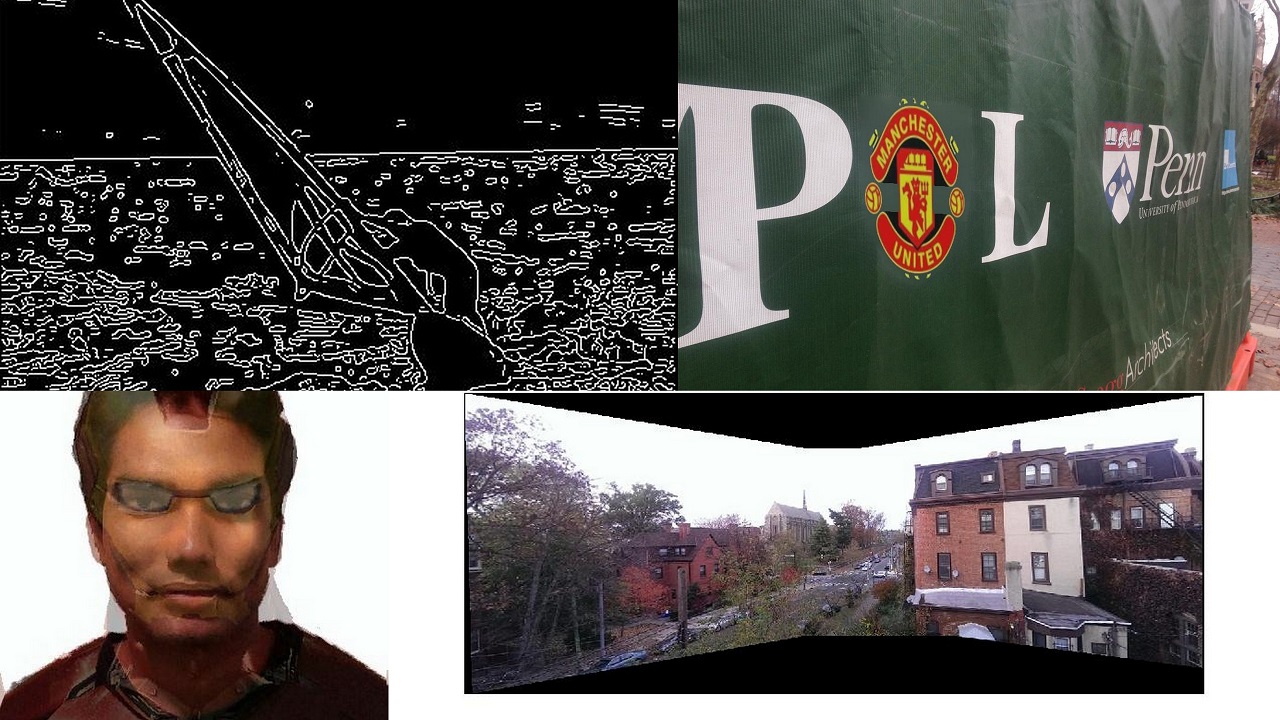
Logo Detection and Replacement

- The project involves detection of the Penn logo in an image and replacement with any chosen logo.
- Implemented SIFT for key point extraction and obtaining feature descriptors which are scale and orientation invariant. More details are available at the VLfeat site.
- RANSAC was used for descriptor matching.
- Estimate homography to get bounding box.
- Use convex hull to identify the region of the logo.
- Remove the logo and smoothen the background using roifill.
- Apply homography to the replacement logo and copy olnly the convex hull of the replacement logo.
- Use bilinear interpolation with inverse warping for smoothened pixel output.
- Use alpha blending to create a realistic look to the warped logo.
Image Mosaicing

- In this project, multiple images were taken to create an automatic panaroma image.
- Harris corner detector was used to get the corner response map.
- Adaptive non maximum suppression was performed on the thresholded corner response map.
- Descriptors were obtained in a small window around the corner points by subsampling and blurring.
- Features were matched with RANSAC
- Estimated the homography and placed the left image and right image on top of the center image and the process was repeated.
- The position of the warped image was adjusted to align with the existing stitched image.
Image Morphing
- In this project, I had to generate a video of my face being morphed to another image or a face.
- I chose the control points on both the images (such as ear to ear, nose to nose and eye to eye).
- Then I took the average of both the images and control points at the mean image.
- I constructed the Delaunay triangulation at the mean image.
- At each frame, I computed the barycentric coordinates of each pixel point of the intermediate image.
- I implemented inverse warping to get the corresponding points in both images using the barycentric coordinates.
- Used bilinear interpolation to get a finer output. I dissolved each of the image depending on which time frame, the intermediate image is being generated for.
- Combined the frames to produce the morphing video.
- I chose the control points(matching) on both the images.
-
For each frame of the intermediate image, I computed the
weights and the constants of the TPS function, for both
x and y coordinates of the two images. - Now using the coefficients of the equation, the corresponding pixel position in the source images were found.
- Used bilinear interpolation to get a finer output. I dissolved each of the image depending on which time frame, the intermediate image is being generated for.
- Combined the frames to produce the morphing video.
Canny Edge Detection

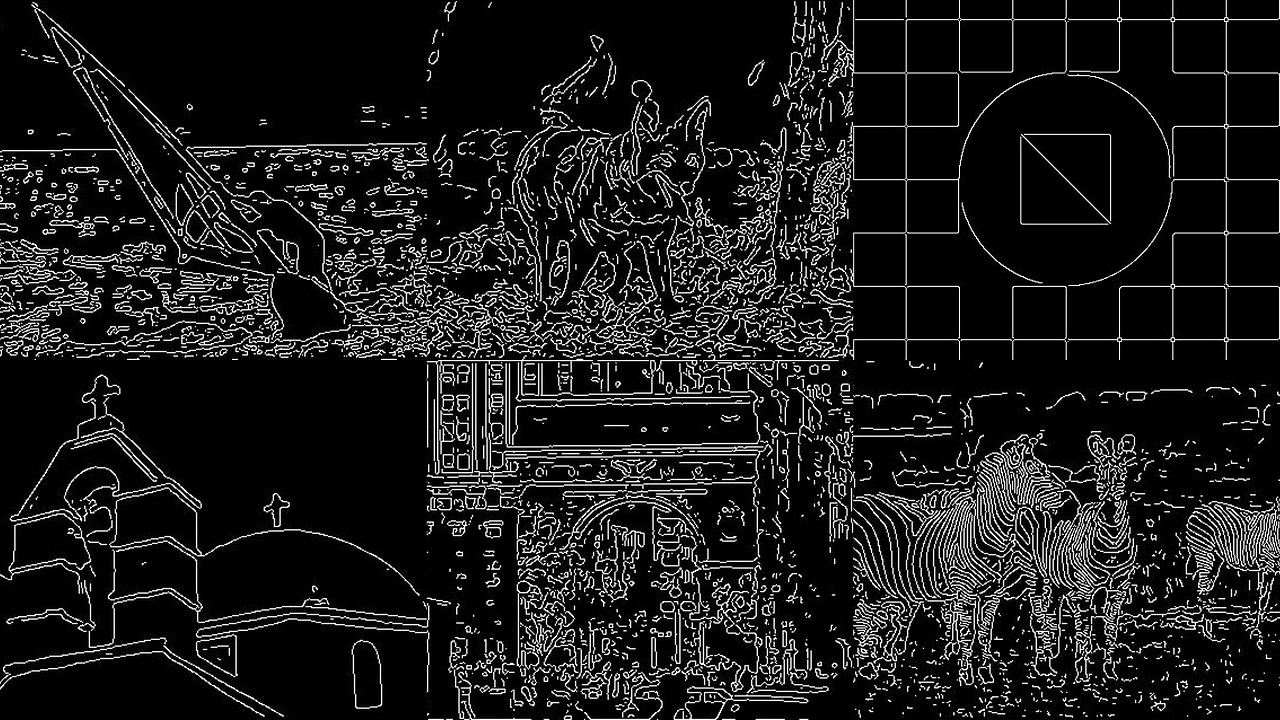
- In this project, I as a part of a two membered team, implemented the Canny Edge Detection, algorithm to detect the edges of an image.
- Obtained the gradient map of the image, in both the horizontal (x axis) and the vertical (y axis) direction, using a simple convolution function by taking the difference of the adjacent points of the image with simultaneous blurring.
- Used bilinear interpolation and performed non maximum suppression.
- Obtained the upper thresholded image and performed hysteresis based edge linking for the edges which were between the upper threshold and the lower threshold
- For thresholding, we performed a technique of adaptive thresholding, in which the value of the upper threshold is chosen at the point at which the intensity values of 65% of the pixels in image are below by using a histogram based approach.
- We were one of the few teams who got full points on this project.