Imitation Learning for path planning using Learch Posted on August, 25th, 2014
Problem Statement
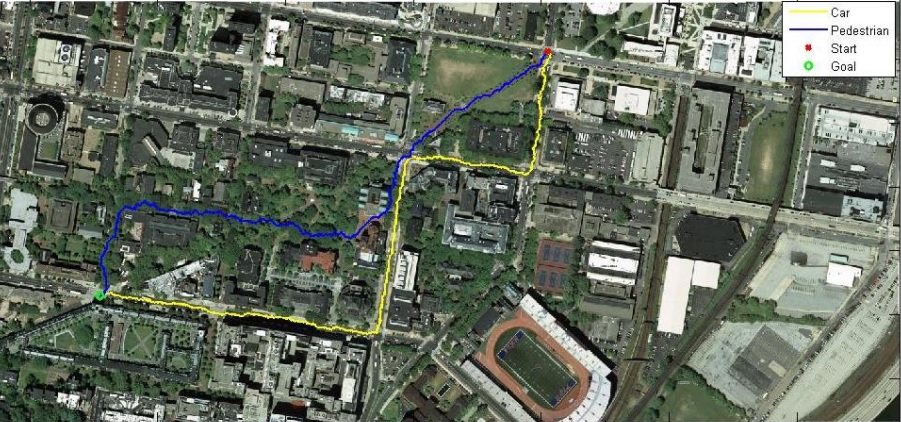
The objective of the project is to use the aerial map image from
Google maps of the Penn Campus and to learn a model for predicting
the optimal path which will be taken by a car and a pedestrian by
using imitation learning (a type of reinforcement learning). So in
the project a parameterized cost map generated using an
exponentiated sum of some weighted features. Using expert examples
of optimal policies in the Learch Algorithm, I get the weights for
the cost map that will produce behavior similar to that of the
expert policy.
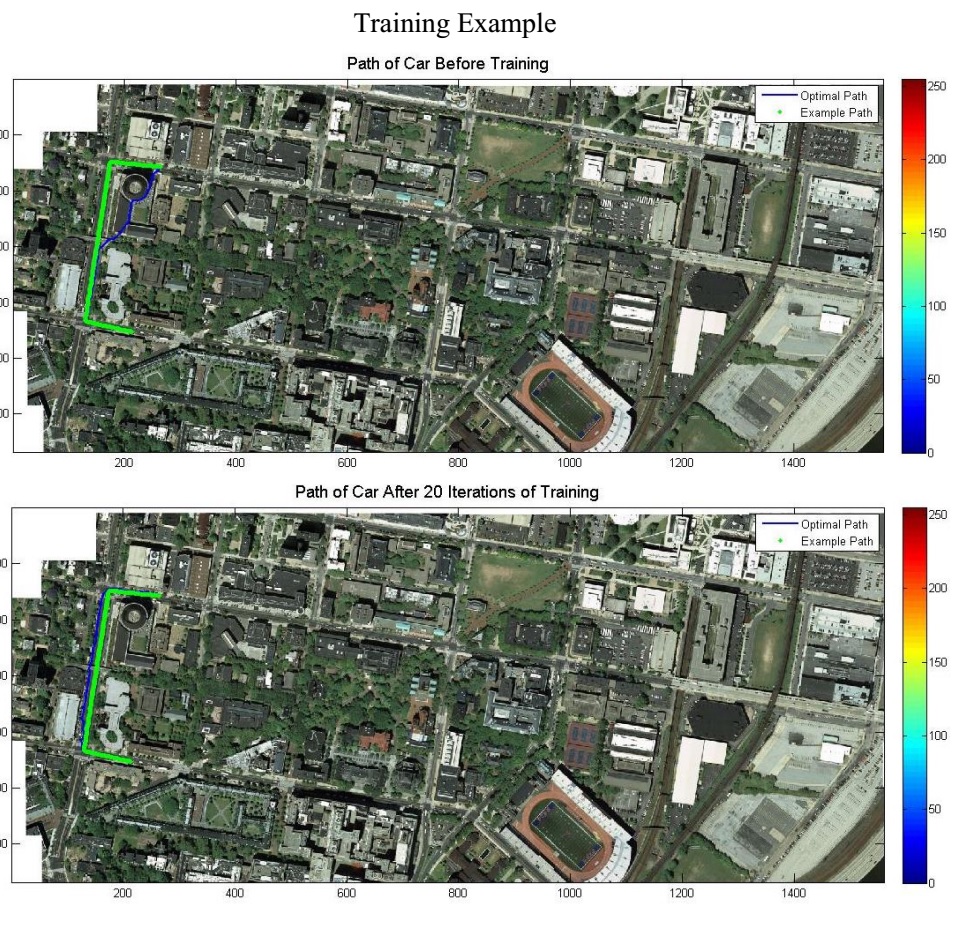
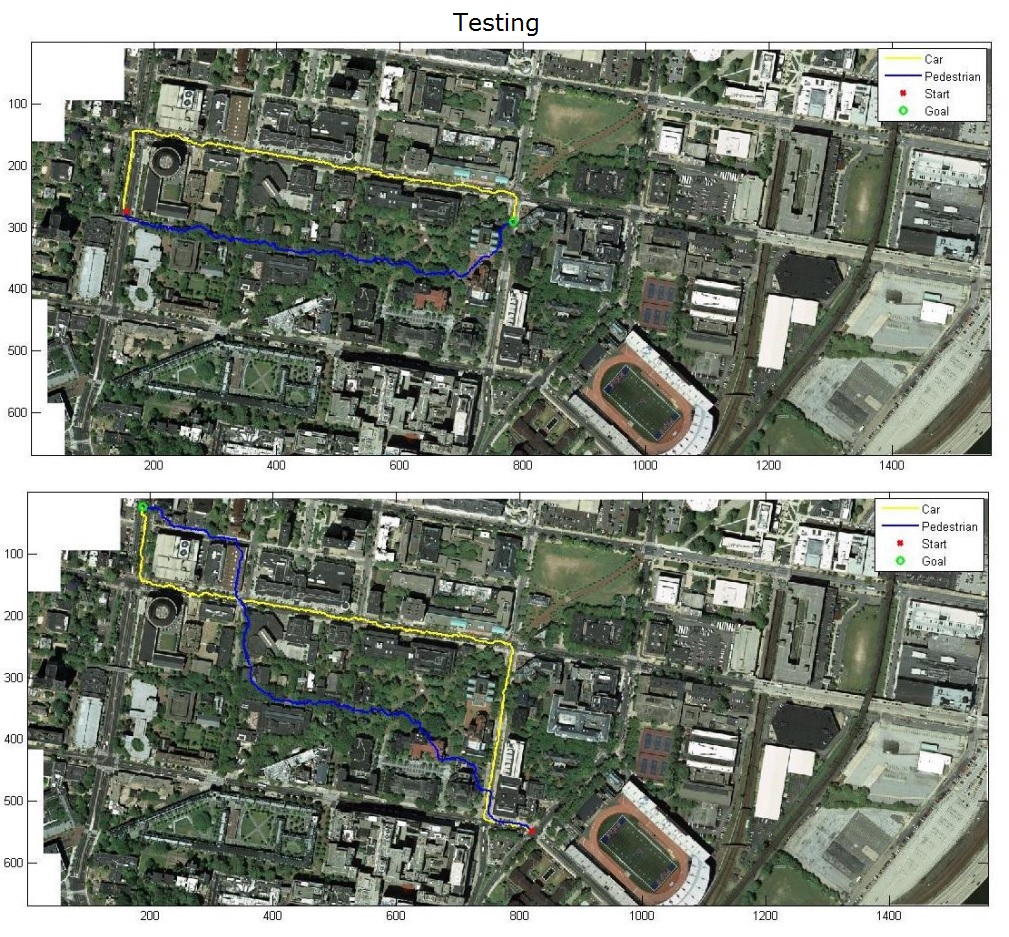
Description of approach
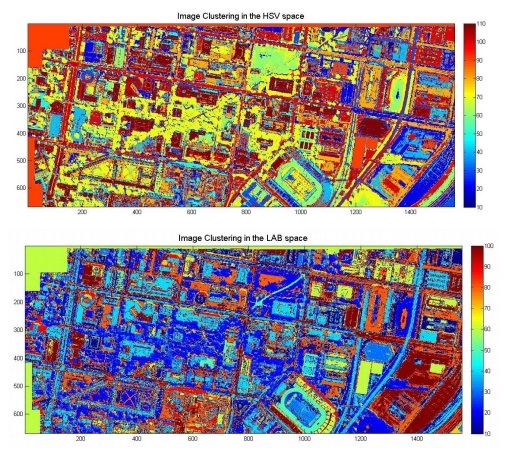
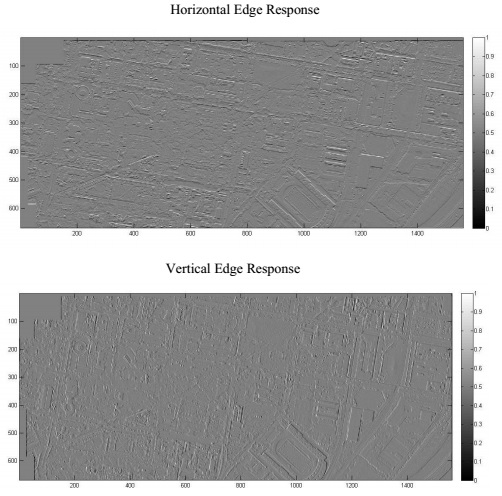
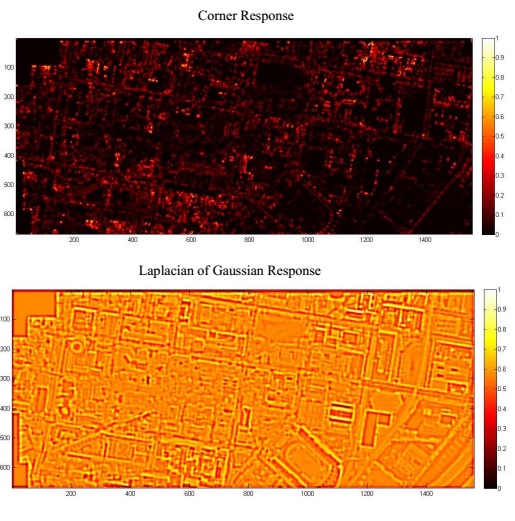
A large chunk of this project work was focused on feature engineering and choosing a good seed for the feature weights to feed into the Learch algorithm for imitation learning. Throughout this report I make references to the Learch algorithm which is based on the paper, "Learning to Search: Functional Gradient Techniques for Imitation Learning" by Ratliff et al. First the image was resized to one eight the original size and then I extracted a bunch of features for every image pixel. By looking at the features I did an educated guess of the weights to be used as a seed to the Learch algorithm which works better and faster when the initial cost map is close to the ideal one. Now, I got a better estimate of the weights using Learch, though I found in some cases the initial seed was a better estimate when the learning rate is not properly set. In every iteration in the Learch algorithm, I compute the cost map with the recently computed weights which I augment by adding a loss field function which increases the costs at the desired path by a fraction of the maximum value of the current cost map (10%). Then I used dijkstra search, to get an optimal path. Now I take all the points in the optimal path and the ones in the desired path of all the MDP's perturb them randomly upto 3 pixels along x and y. I run a binary classification between the features of the points on the perturbed optimal path and the desired path with a L2 regularized Linear Support Vector Machine using Liblinear. I update the old weights with the weight obtained from the classification after scaling with an exponentially decaying learning rate. This procedure was done for both the car and the pedestrian.Feature Engineering