Undergraduate Projects Posted on January, 20th, 2014
Single Axis Industrial Servo Motor Control with Microcontroller
Mechanical Engineering Department, National Institute of Technology, Tiruchirappalli, October, 2012 - May 2013Guide: Dr. K. Pannirselvam
In the project, we attempted to replace the functionality of a PLC in single axis AC servo motor control with a low cost microcontroller board. We designed and integrated the set up required to reproduce an industrial grade single axis servo motor system. Then the electronics circuit boards were designed and fabricated to enable control of the motor driver via the microcontroller board which was an Arduino UNO. The microcontroller was programmed to enable the following controls, position control using a GUI via the serial port, velocity control with the ability to gradually increase and the acceleration and torque control. Finally a cost analysis was carried out to find out the cost advantage of replacing the PLC with a microcontroller which revealed that the replacement is a highly lucrative option.
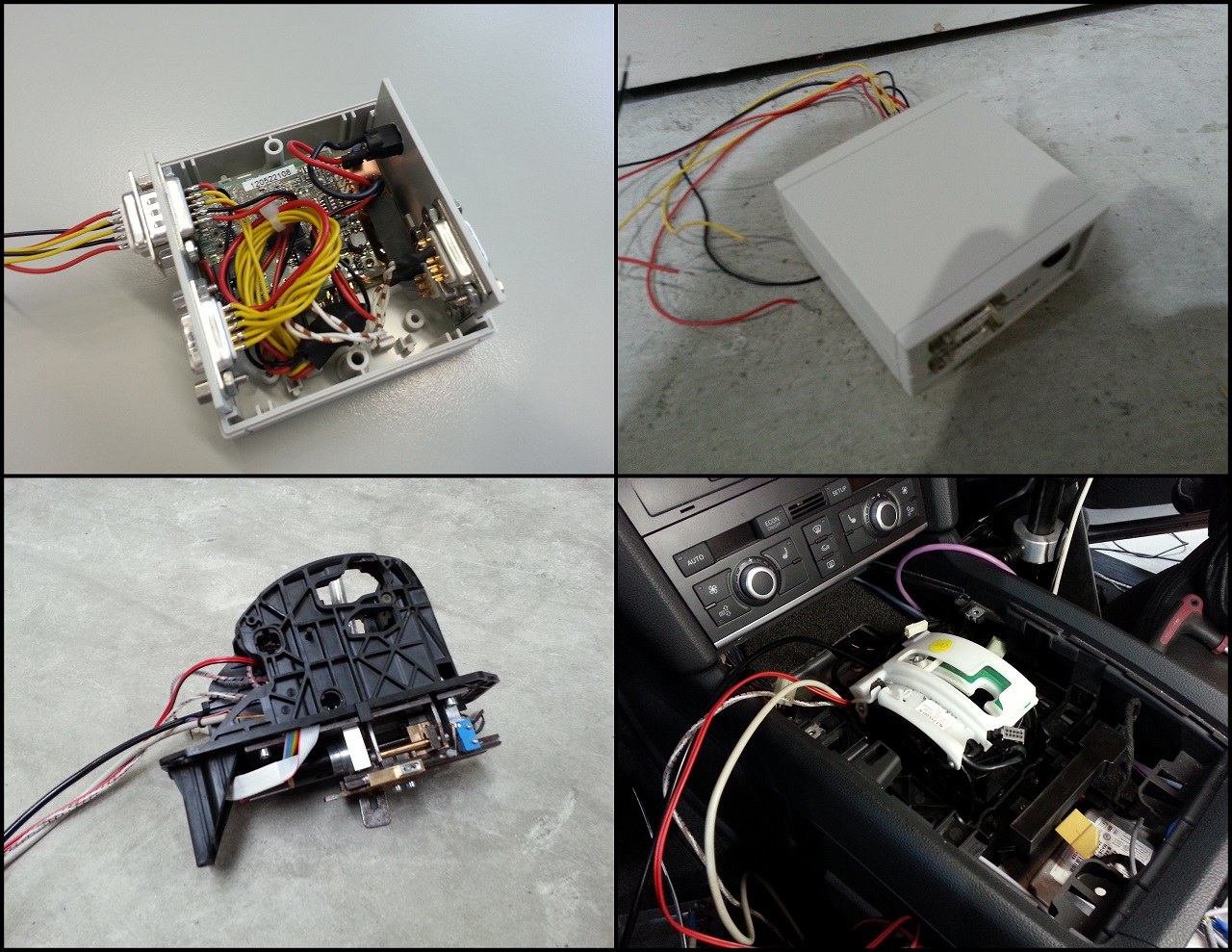
Shift by Wire in Tele-Operated Driving
Institute of Automotive Technology, Technische Universitat Munchen, May, 2012 - July, 2012Guide: Dipl.-Ing. Frederic Chucholowski
The "Tele-Operated Driving" project involves an external operator driving a vehicle using a live-stream video. My project was to implement "Shift by Wire" functionality in the system. The gear shift was automated with a motor controlled by a microcontroller implementing the CANopen protocol. Communications were carried out via the CAN bus. Push button control was incorporated in case of emergencies which were detected by the loss of heartbeat signals from the Autobox which controls all the actuators of the vehicle.
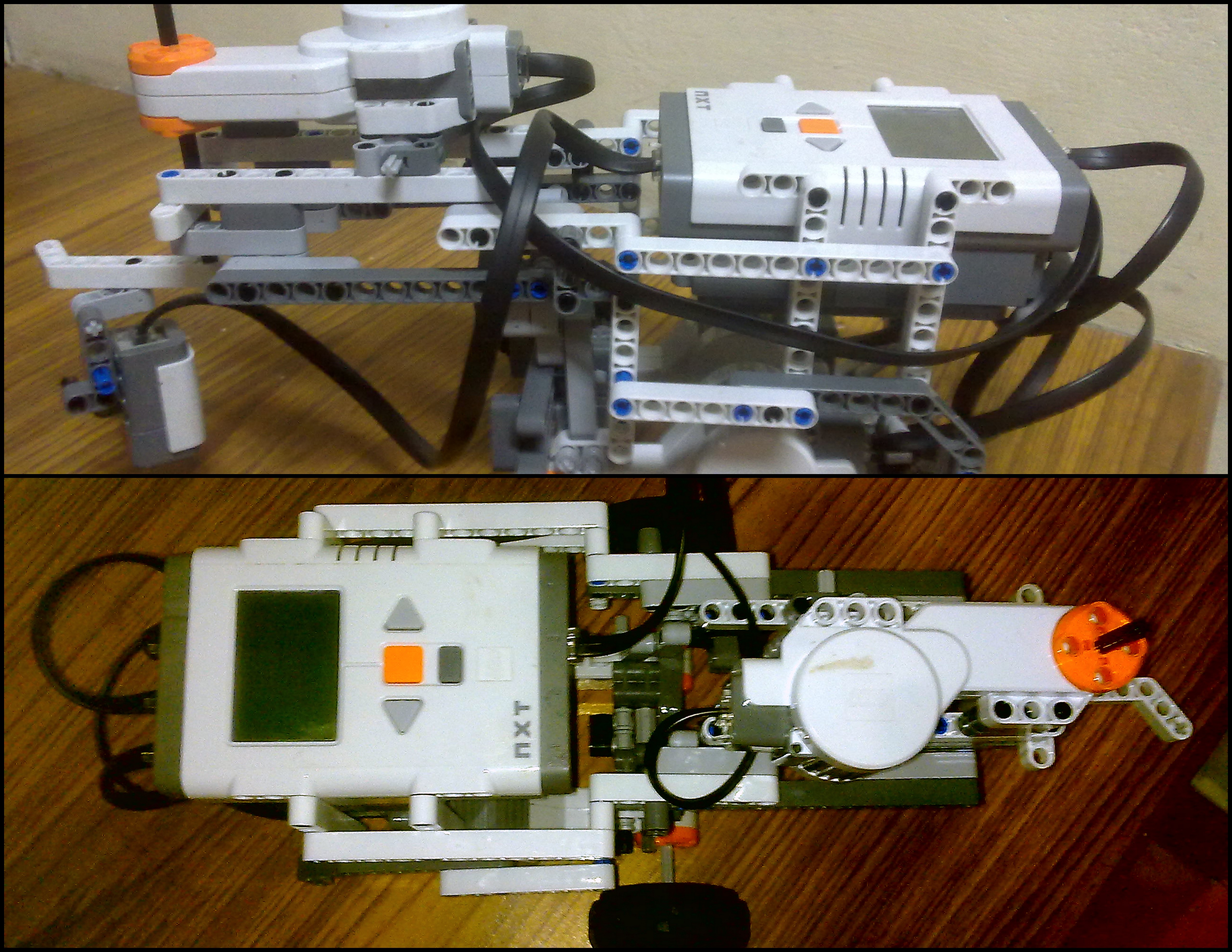
Process Optimization Techniques in Robotics
Chemical Engineering Department, Indian Institute of Technology, Madras, July &December, 2011Guide: Dr. Sridharakumar Narasimhan
The project demonstrated rates of convergence of different optimization techniques. A robot was placed in an arena floor having a functional variation of darkness. It was programmed to reach the darkest region of the arena by taking values only around a single point where it is placed. An approximate function was constructed using numerical methods in Matlab and minimized using the first order Steepest Descent and the second order Newton's Optimization algorithm. The project was continued in December to study the noise cancellation effects of the weighted least square algorithm on the sensor data and its results were compared with ordinary least square algorithm.
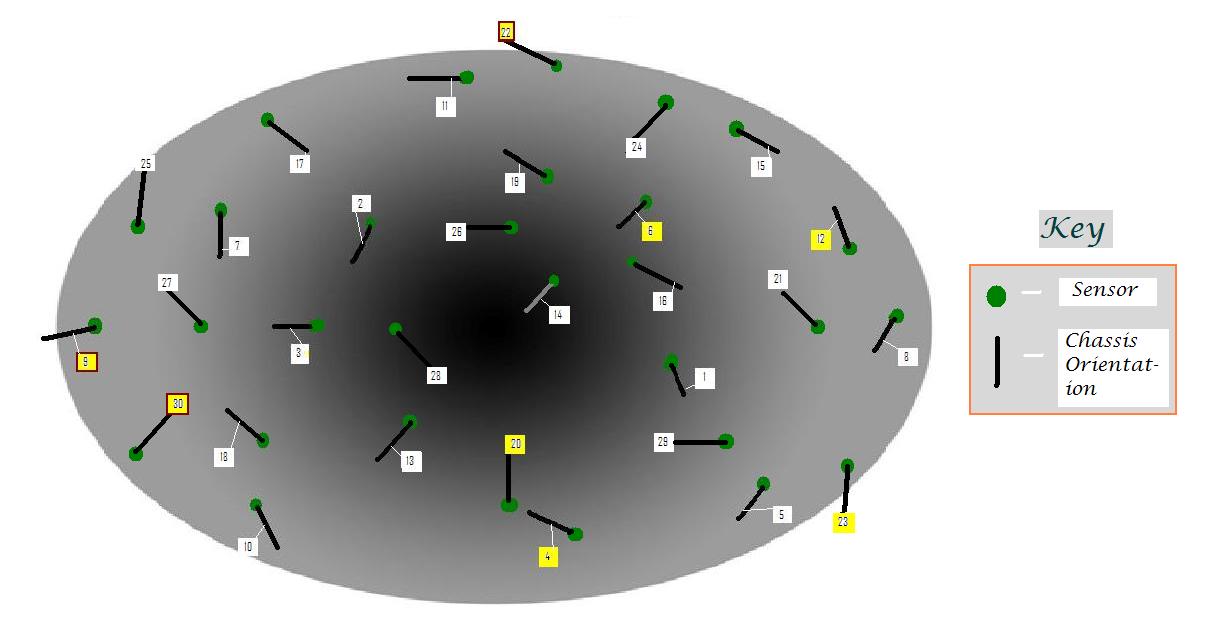
The white regions indicate the orientation and the positions where the algorithm worked well whereas yellow and red indicate regions where the algorithm performed poorly.
Inplant training
Ford Private Ltd, Chennai; BMW Private Ltd, Chennai, July & December, 2010Obtained practical exposure to various processes involved in the manufacture of an automobile. Observed numerous machines and robots utilized in manufacturing and assembly chain.