Learning in Robotics Projects Posted on August, 25th, 2014
Learning in Robotics was a PhD level course, one of the most
draining and difficult courses at Penn. But it also gives you deep
insight into the algorithms in machine learning. It is a completely
project based course with 6 projects. We learnt about the state of
the art techniques in vision and machine learning used for the
various problems in robotics. It is the course where I had to use
everything from machine learning, computer vision, DSP, control
systems to linear algebra for solving the problems.
All the problems used datasets collected at Penn. Some of the data
was deliberately made noisy to make the problems harder. No sample
code or code framework was provided. The course involved lectures
with reading assignments of papers which were to be used to
implement the projects in Matlab or any programming language. All
the algorithms had to be implemented from the ground up.
Projects
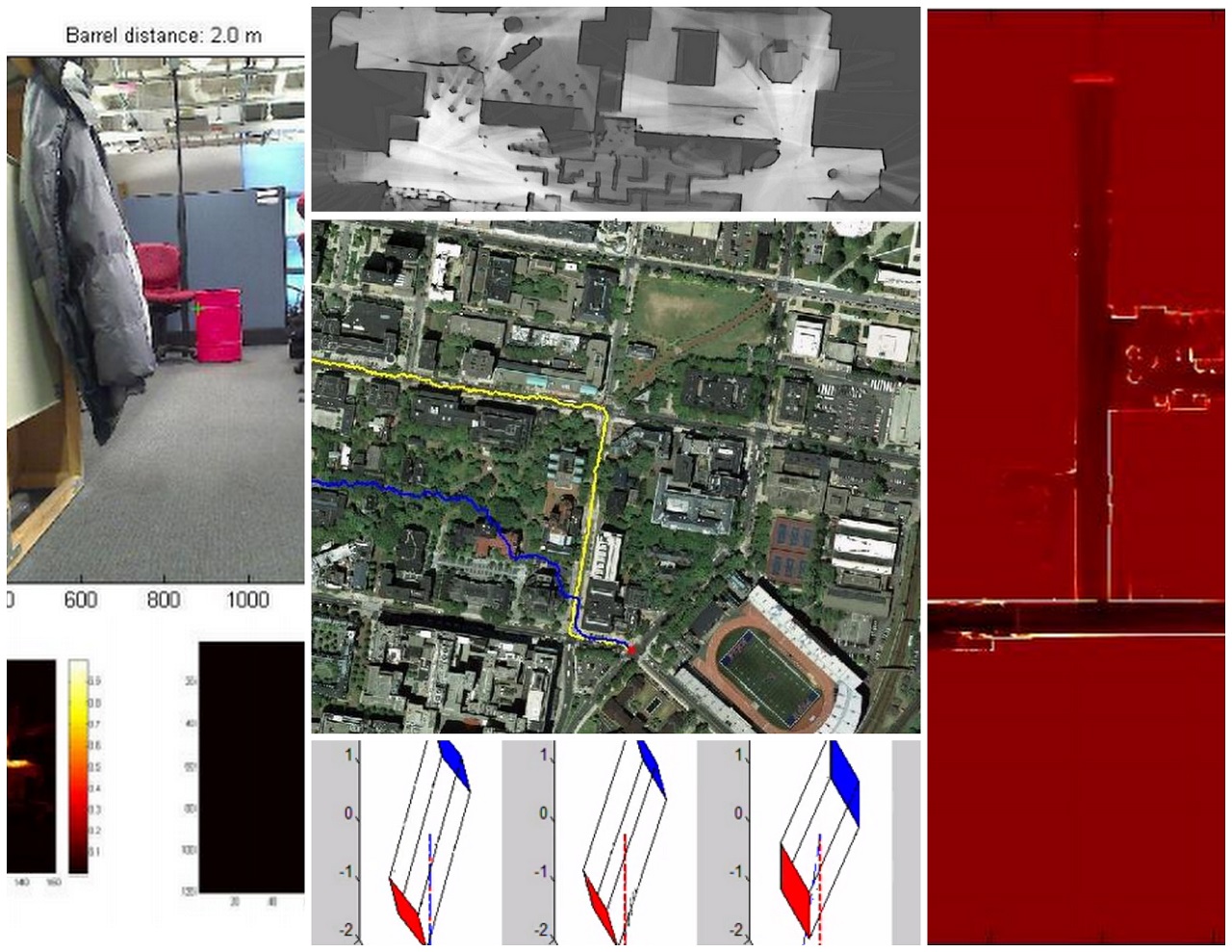
Color segmentation with gaussians
Object detection using color segmentation by modelling the
colors using gaussians. Detecting the depth of the object
using shape properties.
3D orientation tracking with UKF
Use the IMU signals with a 3 axis gyroscope and a 3 axis accelerometer to obtain a robust estimate of the orientation of an object rotated in 3D space by implementing Unscented Kalman Filters. Use the orientation to stitch a panoramic image of the photos taken by a camera mounted on the object.
HMM for Gesture Recognition
Implement Hidden Markov Models to detect the gesture
performed using a phone IMU. The IMU has a 3 axis
gyroscope and a 3 axis accelerometer. Use clustering for
vector quantization of the IMU data.
SLAM with Particle Filters
Use data from a mobile robot, with odometers on each of
the 4 wheels, a LIDAR, gyroscope (3 axes), and an
accelerometer (3 axes) to localize the robot and
simultaneously map the environment (SLAM) using Particle
Filters (PF).
Imitation Learning for path planning
Use the aerial map image from Google maps of the Penn
Campus and to learn a model for predicting the optimal
path which will be taken by a car and a pedestrian by
using imitation learning (a type of reinforcement
learning) by employing the Learch Algorithm, to produce
behavior similar to an expert policy.
Multi-robot Graph-SLAM
Use data obtained from five robots exploring different regions of the same environment with overlap. Robots have a vertical and a horizontal lidar sensor, an IMU and a GPS tracking system. Each robot runs a local SLAM algorithm. Use loop-closures for map merging by implementing Bundle Adjustment or GraphSLAM algorithm.